Interceptor Robotic Sentry System
A cutting-edge interface developed to control multiple autonomous vehicle sentries with a sleek, simple, and intuitive interface.
The Interceptor system was designed to assist security personnel at facilities with geographical and / or environmental challenges where physical intervention is very difficult. I was the lead UX designer tasked with developing the front-end components and functionality of the application.
As the project was kicked-off, I was involved in conversations, both internally and with the client, where we discussed our goals and project road-map. There were so many facets to this project from hardware limitations, software limitations, and external factors that included everything from operating under sub-optimal environmental conditions to interacting with the hardware components with thick gloves on and what challenges that would present.
Tactical Display : The Tactical Display component of the application allows for real-time monitoring and control of the entire site, including camera, sentry, and sensing hardware. The user can view and manipulate cameras, dispatch and communicate with vehicle sentries, and monitor / interact with events that are generated by on-site sensing equipment.
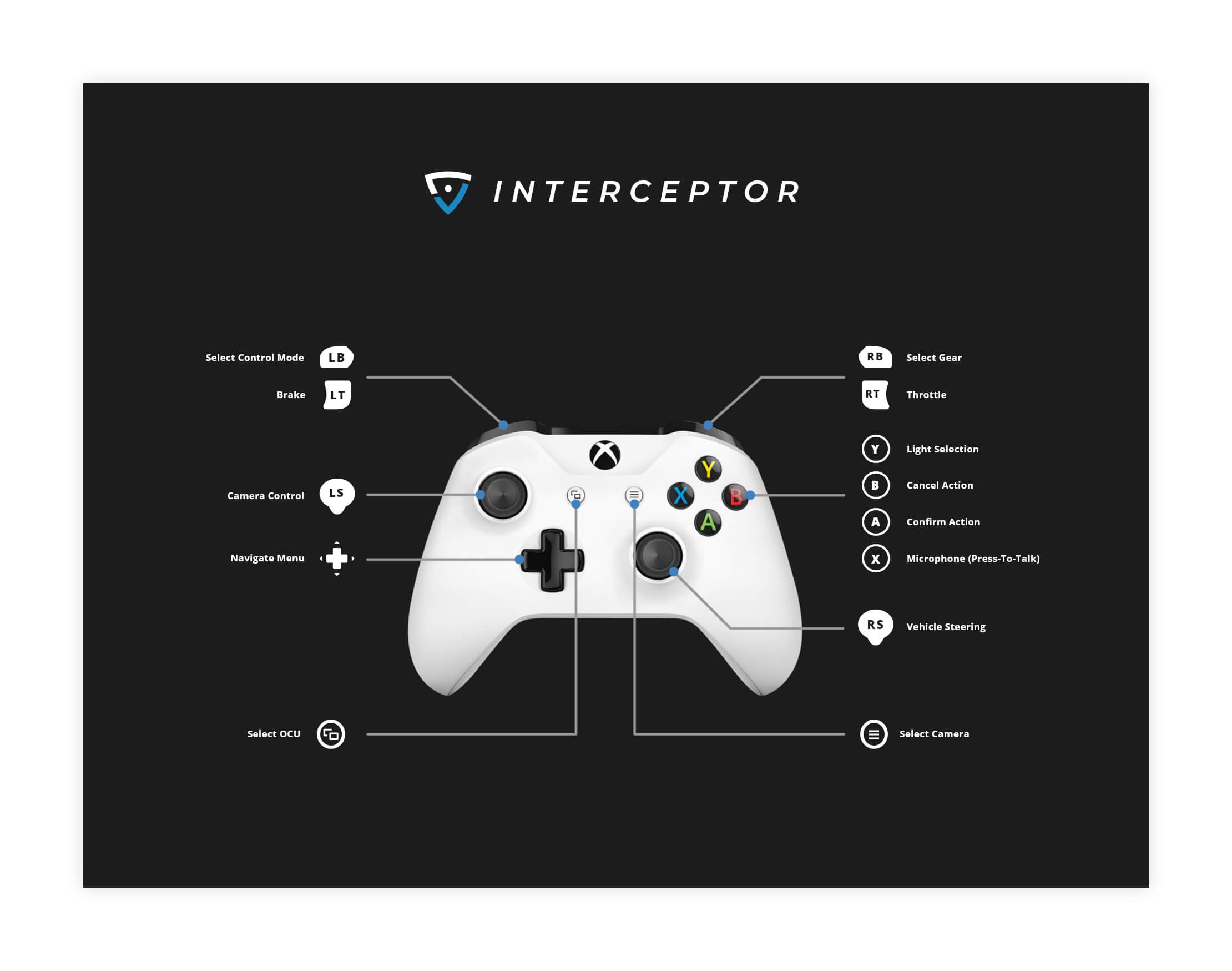
Operator Control Unit (OCU) Display : The OCU Display component of the application allows the user to control a vehicle sentry platform via a gamepad device. The interface controls allow the user to access basic driving functions, such as steering, braking, and acceleration, as well as interact with other on-board components such as cameras, audio capture / transmission, and lights.
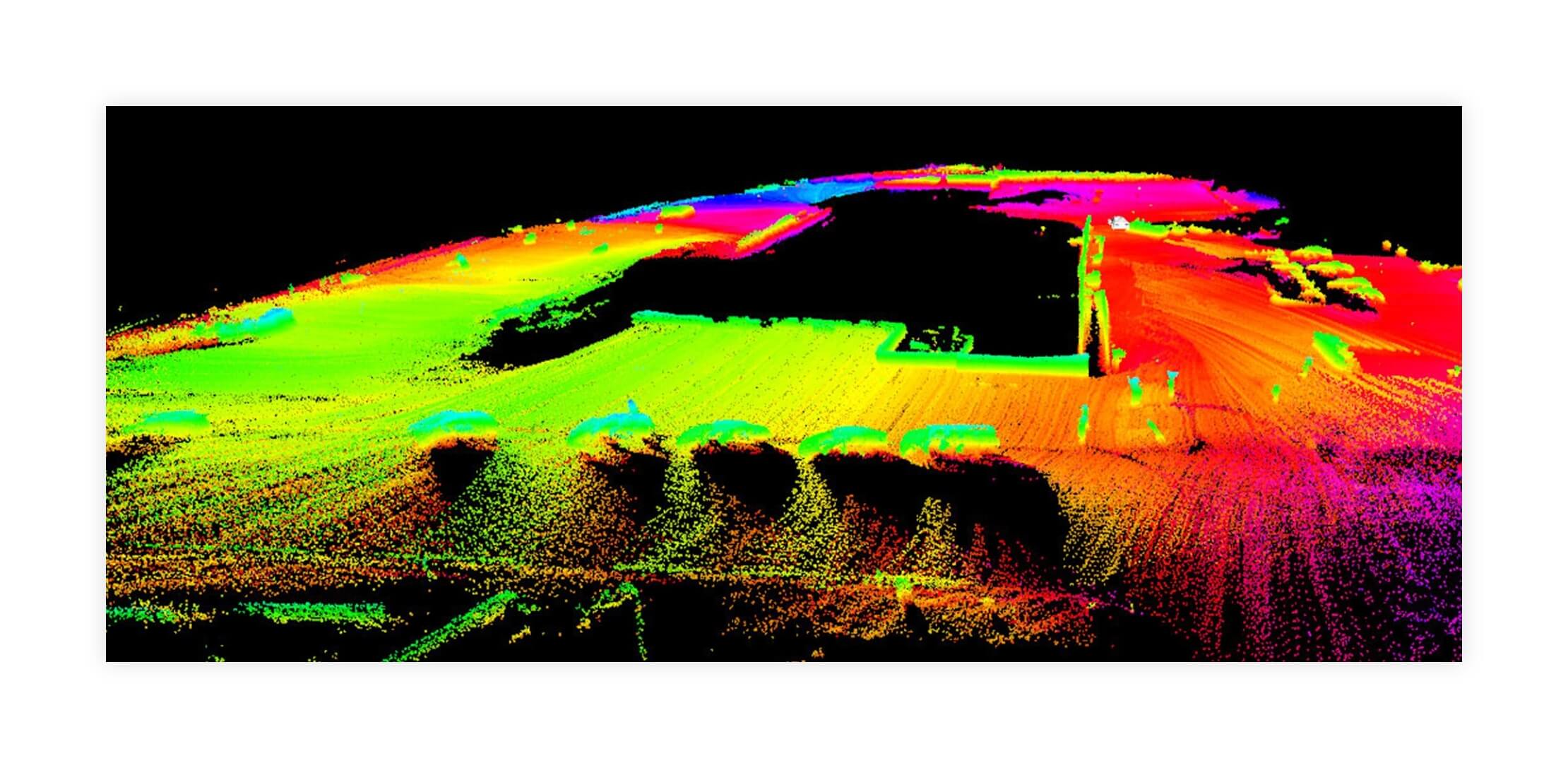
Vehicle Sentry Platform : The vehicle sentry platform is capable of operating under full-autonomy, teleoperation, and manual control. The vehicle, a Polaris Ranger, is modified and outfitted with both front and rear facing cameras, a loudspeaker, manual e-stop triggers, and a computer that is connected to the OCU.
Goals, Strategy, & Execution
Throughout the design process, I worked closely with our mechanical engineers and software developers to ensure optimal synergy between the UI and system architecture. Frequent testing, feedback sessions, and sprint check-ins allowed us to iterate and get new features to code quickly, deploying up-to-date development builds and test plans.
The system was initially deployed and tested by the US Army in 2016. Military personnel were able become proficient with the system and effectively operate a vehicle sentry in less than two hours with observed training sessions. Their enthusiasm for the system was a resounding success, with top leadership and rank and file officers stating: "This is the most intuitive interface we’ve ever used!"